自動駕駛軟件架構中的基礎服務層 挑戰(zhàn)、關鍵組件與演進路徑
自動駕駛系統的研發(fā)是一場融合感知、決策與控制的高度復雜的系統工程,其成敗在很大程度上取決于底層軟件架構的健壯性與靈活性。其中,基礎軟件服務層作為整個軟件棧的基石,承擔著連接硬件、管理資源、保障安全與實現高效通信的核心職能。在實際研發(fā)過程中,這一層的設計與實現面臨諸多嚴峻挑戰(zhàn),同時也孕育著關鍵的技術創(chuàng)新機遇。
一、核心挑戰(zhàn):從異構到實時的多重約束
- 硬件異構性與抽象難題:自動駕駛系統通常集成多種傳感器(如激光雷達、攝像頭、毫米波雷達)、異構計算單元(如CPU、GPU、NPU)以及復雜的車輛線控底盤。基礎軟件服務層必須提供統一的硬件抽象層,屏蔽底層硬件的差異,為上層應用提供穩(wěn)定、一致的接口。不同廠商的硬件在性能、接口協議、驅動模型上差異巨大,實現高效、低延遲的抽象是一大挑戰(zhàn)。
- 確定性與實時性保障:與通用計算系統不同,自動駕駛對任務的執(zhí)行時序有嚴格的確定性要求。從傳感器數據采集、融合到決策指令下發(fā),必須在極短且可預測的時間窗口內完成。基礎軟件服務中的操作系統(通常是實時操作系統RTOS或基于Linux的實時化改造)、中間件及調度器,必須確保關鍵任務不被延遲,這對中斷處理、任務調度、內存訪問等提出了苛刻要求。
- 安全與可靠性的至高準則:功能安全標準(如ISO 26262)要求軟件架構具備從硬件到應用層的系統化安全機制。基礎軟件服務需要實現包括內存保護、故障檢測與隔離、健康監(jiān)控、安全啟動、冗余通信等在內的多重安全機制。如何在滿足安全要求的不犧牲過多的性能與靈活性,是架構設計中的核心矛盾。
- 數據與通信的龐大規(guī)模:傳感器每秒產生數GB的原始數據,各模塊間需要進行高頻、低延遲的通信。基礎軟件服務中的通信中間件(如DDS、SOME/IP、ROS2)必須支持高效、可靠、可配置的數據分發(fā),同時處理節(jié)點動態(tài)上下線、服務質量(QoS)管理等問題。數據序列化/反序列化的效率、網絡帶寬的優(yōu)化都至關重要。
二、關鍵組件與架構模式
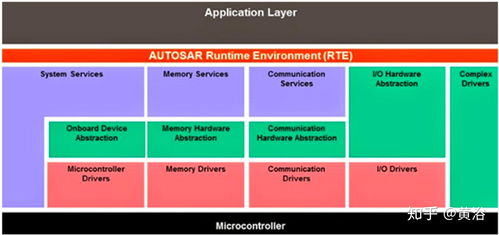
一個典型的自動駕駛基礎軟件服務層通常包含以下核心組件,并常采用“中間件中心化”或“服務化”的架構模式:
- 操作系統與內核:提供底層的任務調度、內存管理、設備驅動框架。QNX、VxWorks等傳統RTOS在安全關鍵領域仍有應用,而基于Linux的實時化方案(如PREEMPT_RT補丁)憑借其豐富的生態(tài)和靈活性,正獲得越來越多的青睞。AUTOSAR Adaptive Platform則是面向高性能計算的新型標準框架。
- 系統框架與中間件:這是基礎軟件層的“粘合劑”。
- 通信中間件:如ROS2(基于DDS)、CyberRT(百度Apollo)、Apex.OS等,提供了基于發(fā)布/訂閱或服務調用范式的分布式通信能力,并集成了節(jié)點發(fā)現、QoS策略、數據記錄與回放等工具。
- 數據與計算框架:管理傳感器數據的流水線處理,優(yōu)化數據在CPU、GPU、加速器之間的流動,減少不必要的拷貝與同步開銷。
- 服務管理框架:實現模塊的松耦合,支持動態(tài)配置、生命周期管理、服務發(fā)現與依賴注入。
- 硬件抽象與虛擬化:
- 傳感器抽象層:統一不同型號傳感器的配置、校準、數據采集接口。
- 執(zhí)行器抽象層:將決策模塊輸出的控制指令,轉換為具體車輛線控系統(如轉向、制動、油門)能理解的協議。
- 計算資源抽象:通過容器化或輕量級虛擬化技術,在共享的硬件平臺上為不同安全等級、不同供應商的軟件組件提供隔離的運行環(huán)境,實現硬件資源的靈活分配與安全隔離。
- 核心系統服務:
- 時間同步服務:確保分布式系統中所有節(jié)點擁有統一、高精度的時間基準(如基于PTP協議),這對傳感器融合和事件排序至關重要。
- 日志與診斷服務:記錄系統運行狀態(tài)、關鍵事件和故障信息,支持遠程監(jiān)控、問題復現與大數據分析。
- 安全監(jiān)控服務:持續(xù)監(jiān)控系統健康度,執(zhí)行看門狗、心跳檢測,并在檢測到故障時觸發(fā)預定義的降級或安全處置策略。
- 配置管理服務:支持車輛軟件參數的在線更新與動態(tài)配置,適應不同的車型、地域或駕駛模式。
三、演進趨勢與未來展望
隨著電子電氣架構向“中央計算+區(qū)域控制”演進,以及軟件定義汽車理念的深入,自動駕駛基礎軟件服務層呈現出以下發(fā)展趨勢:
- 標準化與開源協同:AUTOSAR Adaptive、ROS2等標準與開源框架的生態(tài)日益成熟,降低了開發(fā)門檻,促進了供應鏈協作。廠商在采用標準框架的也會在核心性能與安全模塊上構建自身的差異化競爭力。
- 面向服務的架構深化:SOA理念被廣泛采納,將功能拆分為可復用、可獨立部署和升級的“服務”,通過標準接口通信,極大地提升了軟件的可維護性、可擴展性以及OTA升級的靈活性。
- 混合關鍵性系統集成:在同一硬件平臺上,如何同時運行安全等級要求極高的控制程序(ASIL-D)和生態(tài)豐富的智能應用(如娛樂系統),需要基礎軟件提供強大的時空隔離能力。混合關鍵性系統調度與虛擬化技術是關鍵。
- 數據驅動與AI賦能:基礎軟件層不僅服務于感知和決策算法,其本身也在變得更加智能。例如,利用AI優(yōu)化任務調度策略、預測系統負載、實現異常行為的智能檢測與自愈。
總而言之,自動駕駛的基礎軟件服務層絕非簡單的“底層支持”,而是決定系統上限的關鍵賦能層。它需要在嚴苛的約束下,平衡性能、安全、成本與開發(fā)效率。未來的競爭,不僅是算法的競爭,更是軟件架構,特別是基礎軟件平臺綜合能力的競爭。持續(xù)投入于這一領域的創(chuàng)新與夯實,是構建安全、可靠且可進化的自動駕駛系統的必由之路。
如若轉載,請注明出處:http://www.xinjiayiqi.cn/product/64.html
更新時間:2026-06-03 14:01:39